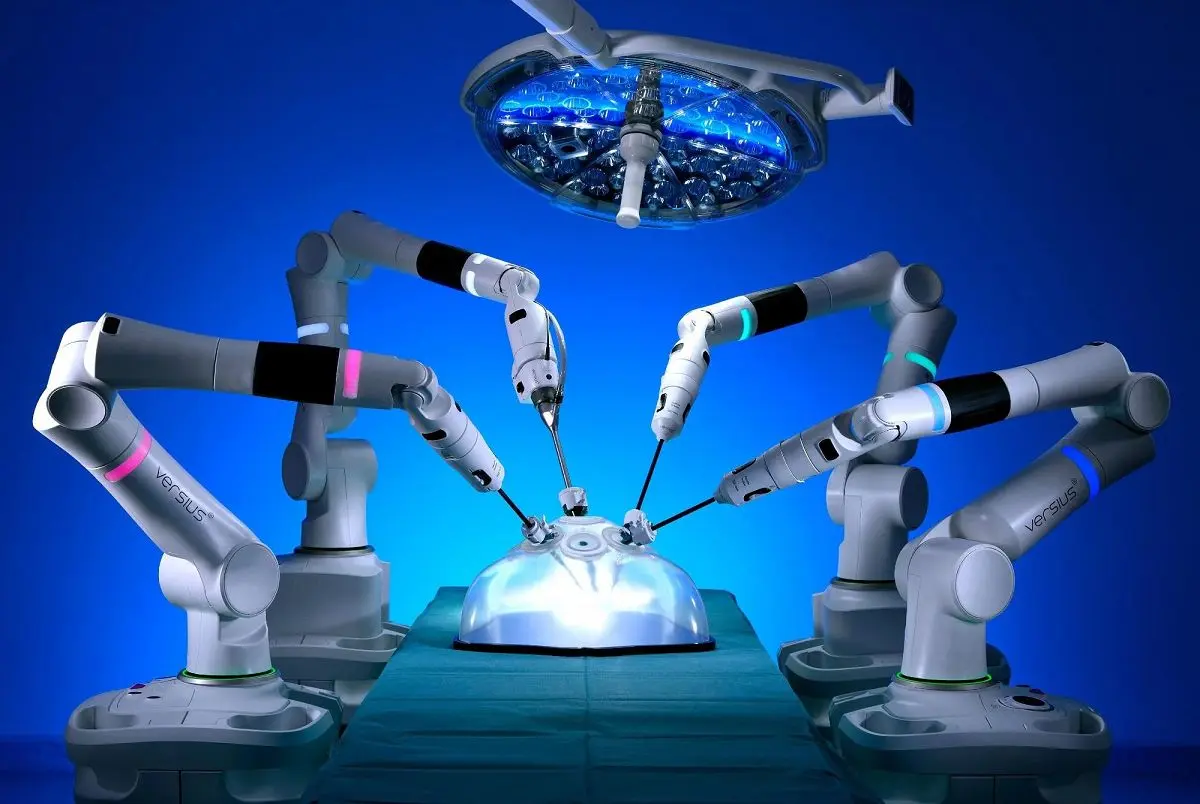
هر یک از دستهای جراح (کاربر) یک کنترل کننده جداگانه را در اختیار میگیرد که به نوعی شبیه به دستههای قیچی به نظر میرسد و با استفاده از آنها میتواند همزمان هر دو بازوی رباتیک اصلی را که هر یک میتوانند ابزار جراحی اولیه متفاوتی را در دست بگیرند، کنترل کند.